





User Case Study:
Model for Delta Robot Motor Sizing Developed using MapleSim






Challenge
To reduce the costly and time-consuming task of building a prototype of a delta robot, B&R Industrial Automation Corporation wanted to develop a high-fidelity robot model. This model could be used to determine proper motor sizing when customizing robots for pick-and-place applications.
Solution
Working with a research team from Heilbronn University, the engineers at B&R used MapleSim to develop a high-fidelity parameterized model of a delta robot.
Result
Using MapleSim, the team was able to generate a delta robot model suitable for virtual motor sizing, greatly reducing the time and money typically associated with the creation of a prototype.
Bernecker & Rainer Industrie Elektronik GmbH (B&R) provides its customers with complete automation solutions that provide maximum flexibility and economic efficiency. B&R worked with Codian Robotics, the leading innovator of pick and place robots, to power a family of delta robots for different applications across multiple industries.
The team used MapleSim, the high-fidelity modeling and simulation platform from Maplesoft to develop and test a delta robot model, based on the Codian D4-1300 robot. The goal of the project was to develop a model that would represent the Codian robot with sufficient accuracy, such that motor sizing could be confidently performed using the model, eliminating the need for physical prototypes.
The Codian robot is powered by B&R control systems - driven by four B&R motors - and is designed to perform with payloads of up to 3kg, with a working envelope of 1300mm. The MapleSim model was developed as a parameterized model which includes rotational position, inertia and ideal gear components from the 1-D Mechanical library in the Motor subsystems, and rigid body frames and multiple types of joints from the Multibody library in the Arm subsystems. The physical parameters of the reference robot such as lengths and masses of the arms, mass and inertia of the tool, and inertia of the motors and their brakes, were then used to configure the MapleSim model.
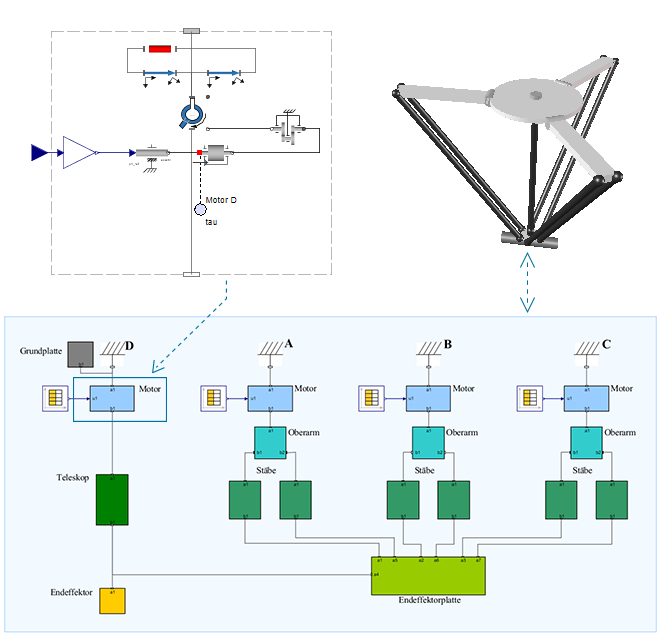
Figure 1 - Modeling the B&R motors, and full delta robot in MapleSim
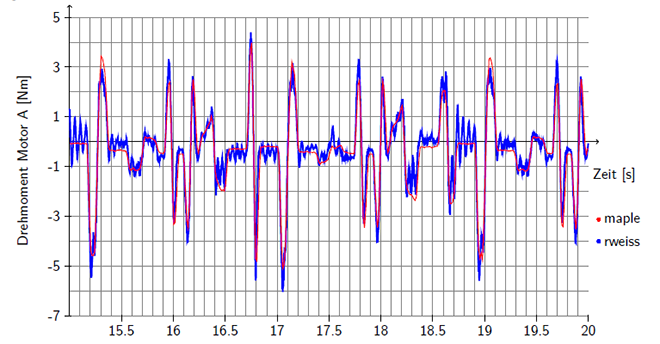
Figure 2 - Torque in Motor A, during pick-and-place from the belt
![]() Contact Maplesoft to learn how MapleSim can help with your projects
Contact Maplesoft to learn how MapleSim can help with your projects