











Highlights:
- See how partial differential equations (PDEs) are discretized in MapleSim for fast, efficient simulation
- Learn how the heat equation is discretized using MapleSim’s seamless connection to all of the computational features within Maple
- Gain an understanding of how to discretize a variety of PDEs for your own projects
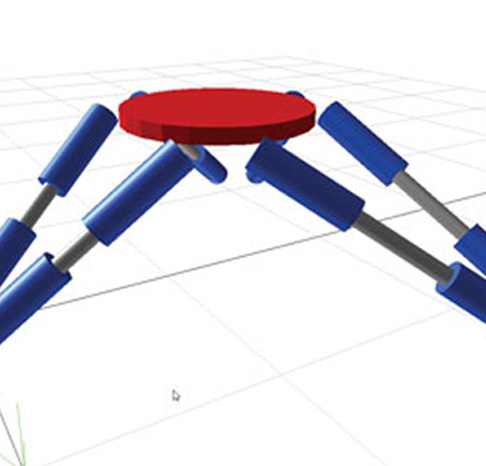
In multibody mechanics, the motion analysis for a platform (the kinematics problem) can be classified into two cases: the forward kinematics problem and the inverse kinematics problem. In general it is pretty straightforward to solve the forward kinematics problem both numerically and symbolically.
In contrast, solving for the inverse kinematics problem is more complex. Because of the complexity involved, the inverse kinematics problem is often solved numerically through iterations, and is computationally expensive. With a numeric approach, however, information about the motion of the mechanism is often lost. In this paper, we will describe how to obtain a symbolic solution to the inverse kinematics problem for a Stewart-Gough parallel link manipulator using tools available in MapleSim.