|
|
 |

Home : Application Briefs : Bicycle Model Supports Design Work of a Health Research and Development Center
 |
Bicycle Model Supports Design Work of a Health Research and Development Center |
|
 |
|
The Challenge
Far beyond the simple ten-speeds of decades past, modern bicycles require increasingly sophisticated designs to meet the demands of today’s customers. As a result, the dynamics of bicycles are being investigated by researchers and manufacturers. An international health research and development center wants to design a new generation of bicycles for its clients. The researchers required a model that was detailed enough to deal with the fundamental dynamics of bicycle motion and could also be expanded to incorporate elements such as different road conditions. They approached Maplesoft to help them create a model for the essential dynamics of a bicycle. A dynamic multibody model of a bicycle must incorporate numerous effects, including the contact force of the tires with the ground, the tangential forces on the tire due to steering, and the gyroscopic effect caused by the inertia of the rotating wheels. They also requested the inclusion of disturbance forces that mimic the motions of a rider, which try to topple the bicycle, and a controller to counteract these disturbances by counter-steering the handlebars.
Creating this model by hand or using a signal-flow approach would be a nearly insurmountable task because there are nine degrees of freedom: the six degrees of freedom of the bicycle frame, the rotation of the back wheel, and two rotational degrees of freedom of the front wheel. The governing equations would have to be solved and rearranged with respect to a particular set of inputs and outputs. Furthermore, incorporating a control system to steer the bicycle would add complexity by introducing feedback loops into the model. Adding contact models for the ground and tire forces would also complicate the model. |
|
The Solution
To address these shortcomings, a dynamic model of a bicycle was created in MapleSim™ that included the contact and disturbance forces and steering controller. The complete model is shown in Figure 1. It is a fully parametric model, meaning that the geometry and masses of the bicycle can easily be changed along with the controller parameters and initial conditions. For example, if the masses of the wheels are changed, the inertia matrix is automatically updated to reflect the change. If the initial velocity of the bicycle or wheel radius is changed, the rotational velocity of the wheels is updated.
The tangential tire forces were calculated using simple vector algebra and implemented as a MapleSim custom component, TF1,as illustrated in Figure 2. This feature allows the user to add a set of governing differential or algebraic equations whose inputs and outputs are accessible through pins on the resulting MapleSim component. The parameters of the component may be changed, adding flexibility and improving the ability to reuse components.
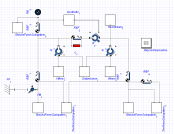 |
| Figure 1 – The resulting bicycle model in MapleSim. |
|
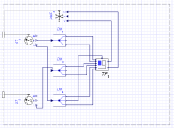 |
| Figure 2 – The TireForce subsystem. The various translational positions and velocities are fed into a tire force custom component, TF1, which uses basic vector algebra to output the necessary tangential forces to the tire. |
|
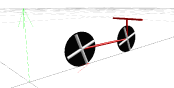 |
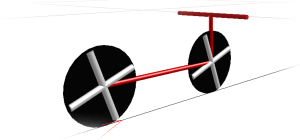
| Figure 3 – The bicycle visualization allows the user to quickly interpret how the bicycle behaves under various operating conditions. |
|
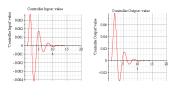 |
| Figure 4 –A MapleSim simulation of the dynamic response of the bicycle model. The controller input is shown on the left and corresponds to the angle of rotation of the bicycle about its longitudinal axis (the “tipping” angle). The controller output, shown on the right, corresponds to the applied steering angle of the bicycle in response to the tipping angle. |
|
|
MapleSim also provides 3-D visualization capabilities, so that the user can see the behavior of the bicycle in real time. The visualization in Figure 3 was created entirely using cylinders whose lengths scale with respect to the bicycle geometry. The benefit of the visualization is that the user can very quickly understand how the bicycle responds to a set of operating conditions as opposed to the tedious task of attempting to interpret sets of output data. When actual numerical data is required, probes are used to gather data on specific states within the model. Figure 4 is an example of a plot generated from MapleSim probes. It shows the angle of rotation of the bicycle about its longitudinal axis and the compensatory steering angle, which are the PID controller input and output respectively.
As a result, the health research and development center now has a flexible, sophisticated multibody model of a bicycle that can be used further in its design work. |
|
|
|
|