|
||||||||||||||||||||||||||||||||||||||||||||||||
The two following applications highlight some of these new features.
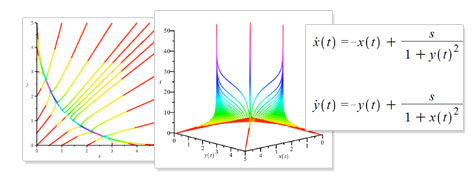
Application 1: Stability analysis of a parametric dynamical system Consider a biological system described by the nonlinear multiple switch model
where the unknowns The equilibria of
The following two Hurwitz determinants determine the stability of the hyperbolic equilibria of
The semi-algebraic system below encodes the asymptotically stable hyperbolic equilibria:
We solve this problem by first computing a real comprehensive triangular decomposition of P, with respect to the parameter s, using the new command RealComprehensiveTriangularize:
This is a decomposition of the original system into several simpler triangular systems and some additional conditions on the parameter
Suppose we are interested in those values of
The condition on
The locations of the stable equilibria are described by the following triangular system from the first entry:
We now illustrate the result by discussing the special case
We verify that the last inequality is satisfied:
Below, we graphically display trajectories of the dynamical system in the special case. The first plot is a 2-D animation, and the second one is a 3-D static plot with time as the z-axis. We can see the two stable equilibria well in both plots, but there is also a third, unstable, equilibrium that can be seen best in the 3-D plot.
In Maple, the branch cut for the square root function
The following plot depicts these three branch cuts.
By continuity arguments, it is now sufficient to check the proposed identity at finitely many points covering all possible combinations of branch cuts. Such a set of points can be computed using the command CylindricalAlgebraicDecompose. This example takes advantage of one of the newly supported output types for this command, added in Maple 16.
The union of all branch cuts was decomposed into the 7 disjoint intervals above. We pick one sample point for each interval:
We also add one sample point
The following graph displays the sample points in relation to the branch cuts.
Now we check whether the identity identity1 holds for all of these sample points:
We conclude that identity1 is not an identity, and we can even say precisely when it fails: on the first interval Now we proceed in the same way for the second proposed identity identity2. The branch cuts are:
We need only 2+1 sample points in this case:
Thus we have proved that identity2 is indeed an identity. |
||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||
](/products/maple/new_features/images16/PolynomialSystemSolving_5.gif)
](/products/maple/new_features/images16/PolynomialSystemSolving_12.gif)
![Display(C[1], R)](/products/maple/new_features/images16/PolynomialSystemSolving_30.gif)
![Display(result[1], R)](/products/maple/new_features/images16/PolynomialSystemSolving_42.gif)